PhD Videos
Here are some pictures and videos from my PhD thesis.

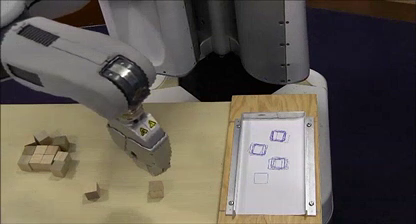
PR2 reliably arranging six blocks
Here the robot is assembling 1-inch blocks using a mixture of placing and pushing actions. What we see here is the execution of a conformant plan. Prior to execution, we used machine learning to characterise the uncertainty of the placing and pushing actions; then, we used a conformant planner to find a sequence of actions that form the desired arrangement.

Arranging objects with belief overlay
This video shows a visualization of the robot's belief of the objects location during the arrangement process. The robot did not use perception during the execution-- this overlay is created for us to visualize the algorithm (and debugging).
PR2 placing blocks
This video shows some of the placing experiments I conducted to characterise the uncertainty of a place action. As you can see, there is considerable noise whne placing the block-- this is due to the block sticking to the robots finger's while being dropped. I estimated the placing offset to have about plus or or minus 0.15 inch noise in desired x or y position and up to 15 degrees rotational offset.
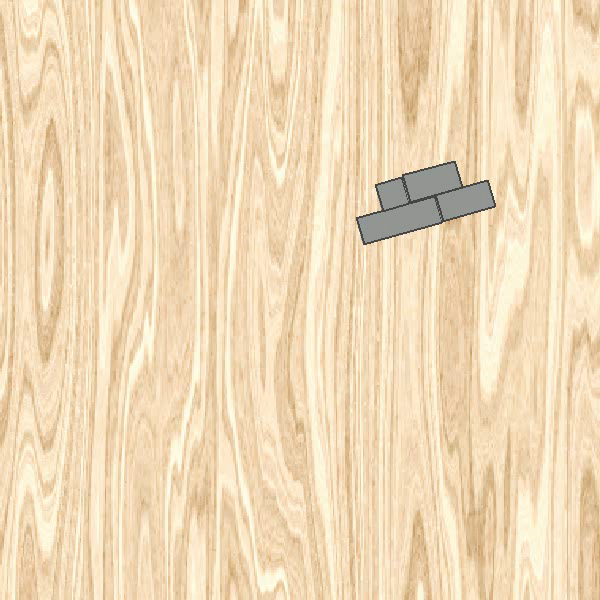
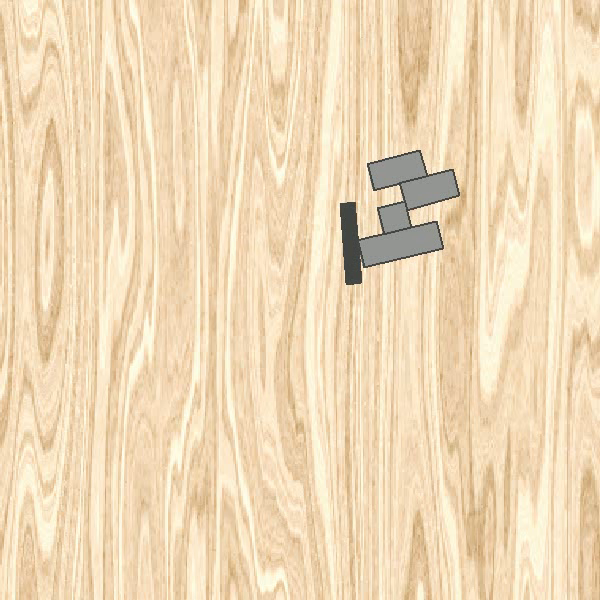
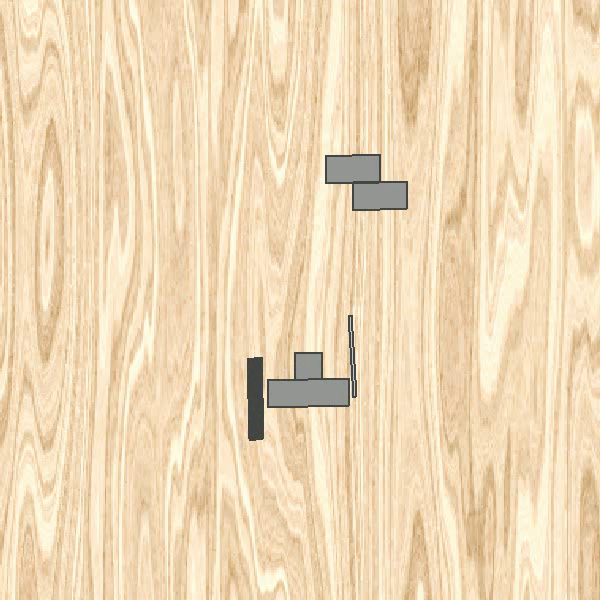
Plan improvement with fixture placement
The second part of my thesis looked at improving plans that were originally found without considering uncertainty. Given this easier initial planning problem, we could solve plans for more complicated shapes and desired poses. Then, we ran an optimization algorithm to improve the initial plan by placing fixtures.

Eric the red robot
This is Eric, the cartoon robot that was prevelant in every slide during my thesis defense.
Eric is named and based off of Leslie P. Kaelbling's "Eric the Red Robot". Leslie attributes her robot stick figure drawing to her advisor and came before the original "Eric" robot even existed.
Here are a couple of versions of Eric I created using Inkscape: Eric with a picketing sign and Blindfolded Eric not using his perception sensors.
{kind=link}
{kind=link}